Совершенствование систем помощи
водителю (ADAS) и беспилотного вождения
с помощью автомобильного радара миллиметрового
диапазона

Ежегодно в ДТП гибнет 1,2 млн. человек, и при этом 90 % смертей вызваны человеческим фактором (пьяная езда, превышение скорости, игнорирование дорожных знаков и сигналов светофора, обмен SMS-сообщениями за рулем). Потеря 1,2 млн. жизней в год эквивалентна ежедневному крушению семи 500-местных пассажирских самолетов.
Чтобы свести смертность вследствие ДТП в идеале к нулю, производители автомобилей и поставщики автокомпонентов, государственные и научные учреждения, а также организации, не связанные с автопромом, совместными усилиями разрабатывают системы помощи водителю (ADAS) и беспилотные транспортные средства.
Новая автомобильная экосистема объединяет широкий круг новейших
технологий, таких как:
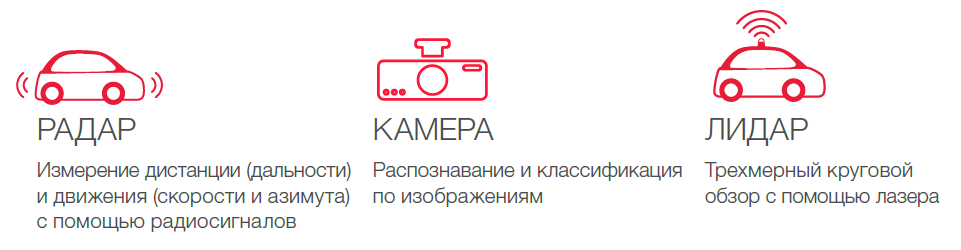
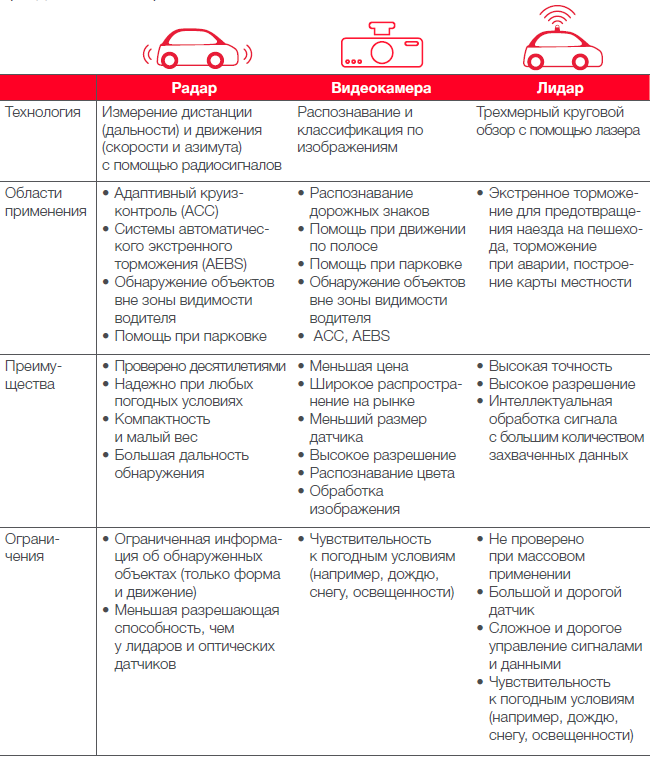
• Сочетание радиолокационных (радары), лазерных дальномерных (лидары) и оптических (видеокамеры) датчиков
• Высокоскоростные информационные системы, объединяющие автомобильные сети Ethernet, высокоточные навигационные системы с картами высокого разрешения (HD) и искусственный интеллект (AI)
• Связь автомобиль-автомобиль (V2V), автомобиль-сеть (V2N), автомобиль-инфраструктура (V2I), автомобиль-пешеход (V2P), автомобиль-энергосистема (V2U) и в конечном счете автомобиль-любой объект (V2X)
Поскольку каждая технология обнаружения имеет свои преимущества и ограничения, автопроизводители не могут ограничивать себя применением только одной из них. Большинство ведущих разработчиков систем беспилотного вождения объединяют все три технологии обнаружения. Это гарантирует предоставление этим системам данных в требуемом
диапазоне, с надлежащим разрешением и достоверностью.
Беспилотные автомобили принесут огромную пользу, спасая жизни и делая вождение безопаснее. В силу этого конструкторы должны доказать, что разработанные ими технологии являются надежными и безопасными. Но недавний смертельный наезд беспилотного автомобиля на пешехода вызвал серьезную озабоченность. Регулирующие органы и граждане не допустят массового использования беспилотных транспортных средств, пока не будет доказано, что вероятность машинных ошибок близка к нулю (независимо от того, насколько хорошо может машина предотвращать несчастные случаи по вине человека). Решить эту проблему можно через использование наиболее надежных технологий обнаружения, работающих в любых условиях. А для проверки их точности и надежности необходимы самые лучшие системы моделирования и тестирования.
Предотвратить можно лишь то, что можно обнаружить.
Три основные технологии обнаружения
Из всех существующих типов датчиков самыми новыми являются лидары, появление которых вызвало восторг на рынке беспилотных транспортных средств. С помощью лазера они обеспечивают построение круговой трехмерной картины окружающей обстановки вокруг беспилотного автомобиля в радиусе 100 метров. Некоторые лидарные системы имеют до 64 каналов и осуществляют сканирование со скоростью до миллиона точек в секунду. Такой объем информации обеспечивает разрешающую способность до 2 см, позволяя точно отслеживать меняющуюся обстановку.
Однако лидары еще не прошли массовую проверку на рынке, а круговое сканирование в них обеспечивается вращающимися деталями. Лидар генерирует огромные объемы информации, обработка которых требует большой вычислительной мощности и развитой системы управления данными. Несмотря на недавние заявления о выпуске более бюджетных версий, лидары остаются очень дорогими устройствами.
Оптические датчики (видеокамеры) являются самыми дешевыми, хотя обработка изображений может быть дорогостоящей. Они обеспечивают идентификацию и классификацию объектов и считывание дорожных знаков. На работу камер влияет погода и другие условия окружающей среды, в силу чего на них нельзя надеяться постоянно. Это ограничение было выявлено вследствие аварии, когда автомобиль с частичным набором средств обеспечения автономности врезался в белый грузовик, который не был распознан камерой на фоне белых облаков.
Автомобильный радар является наиболее надежным датчиком, определяющим расстояние до объекта (дистанции) и параметры движения (скорости и азимута) практически в любых условиях. Он использует отраженные радиоволны для обнаружения одних препятствий на фоне других и предъявляет невысокие требования к обработке сигнала. Радары с успехом используются в течение десятилетий в других областях, тесно связанных с обеспечением безопасности, таких как авиация и управление воздушным движением, кораблевождение, охрана правопорядка и, конечно, автотранспорт.
Традиционный узкополосный автомобильный радар 24 ГГц имеет ограниченную возможность различать объекты и идентифицировать людей, собак, другие автомобили и даже картонные коробки. И хотя система полностью беспилотного вождения не может получать всю необходимую информацию только от автомобильного радара, он оказывается незаменимым для системы ADAS, которая исправляет ошибки водителя и тем самым является переходным этапом к полностью беспилотным транспортным средствам. В настоящее время с помощью автомобильного радара система ADAS решает следующие задачи: автоматическое экстренное торможение, предупреждение о возможном лобовом столкновении, обнаружение объектов вне зоны видимости водителя, помощь при смене полосы, предупреждение о возможном ударе сзади, адаптивный высокоскоростной круиз-контроль при движении по автостраде, круиз-контроль в режиме старт-стоп при движении в пробках.
Хотя каждая технология играет важную роль в развитии беспилотных транспортных средств, именно радиодатчики имеют решающее значение для обеспечения безопасности на дороге. Из всех доступных датчиков только автомобильный радар однозначно определяет три главные переменные – скорость, дальность и азимут – независимо от освещенности и погодных условий.
Автомобильный радар делает вождение более безопасным
В автомобильной радиолокации, где в основном используются узкополосные радары диапазона 24 ГГц, наметился быстрый переход в диапазон 76-81 ГГц с полосой 5 ГГц, где используются непрерывные ЧМ-сигналы (FMCW) и антенны с формируемой диаграммной направленности.
При этом диапазон 76 ГГц используется для обнаружения на большой дальности, а 77-81 ГГц – на малой дальности с высоким разрешением. Очень важно понимать, насколько сильно переход на более высокую частоту и широкую полосу улучшил характеристики автомобильных радаров.
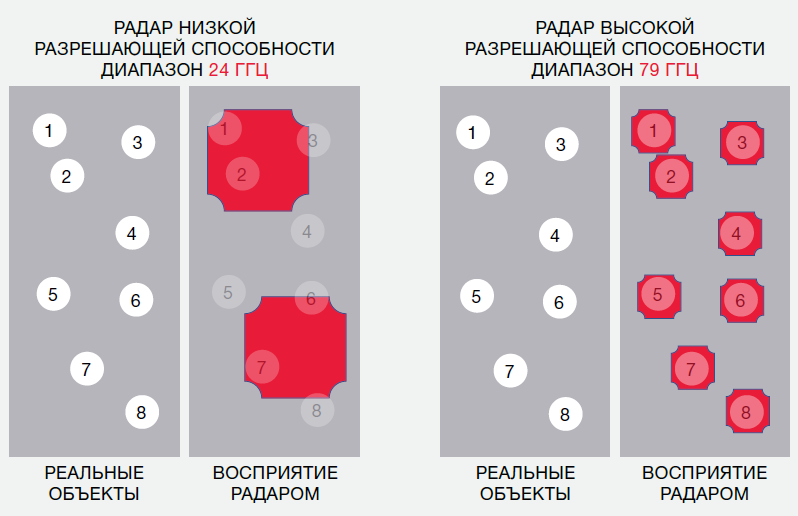
Погрешность измерения расстояния и разрешающая способность по дальности обратно пропорциональны ширине полосы. При переходе с 24 ГГц на 77 ГГц разрешающая способность по дальности и точность радара увеличились в 20 раз. Например, радар 24 ГГц имеет разрешающую способность 75 см, а для радара 77 ГГц она составляет всего 4 см, что позволяет ему лучше распознавать близко расположенные объекты (рис. 1).

Также пропорционально уменьшению длины волны увеличиваются разрешающая способность и точность измерения скорости. Таким образом, при переходе с 24 ГГ на 77 ГГц точность измерения скорости увеличивается втрое.
Другим преимуществом перехода в миллиметровый диапазон длин волн является выигрыш в размерах и массе. Поскольку длина волны сигнала 77 ГГц втрое меньше длины волны сигнала 24 ГГц, площадь антенны радара 77 ГГц в девять раз меньше площади антенны радара 24 ГГц. Датчики становятся меньше, благодаря чему их проще спрятать, что благотворно сказывается на дизайне автомобиля, и легче, что обеспечивает экономию топлива.
Сравнительное испытание радаров с полосой 1 ГГц и 4 ГГц (рис. 2) ясно показали, что только более широкая полоса позволяет различить два объекта, находящиеся в 10 см друг от друга. Более узкополосный радар не в состоянии различить два разных объекта и предоставляет недостоверные данные водителю или системе беспилотного вождения, что приводит к принятию неправильных решений. Если человек идет рядом с собакой и собака выпрыгивает на проезжую часть, то только широкополосный радар (рисунок справа) сможет распознать их по отдельности и предоставить правильную информацию водителю или системе беспилотного вождения. А более узкополосный радар (рисунок слева) предоставит недостоверную информацию, что может привести к трагическому инциденту.
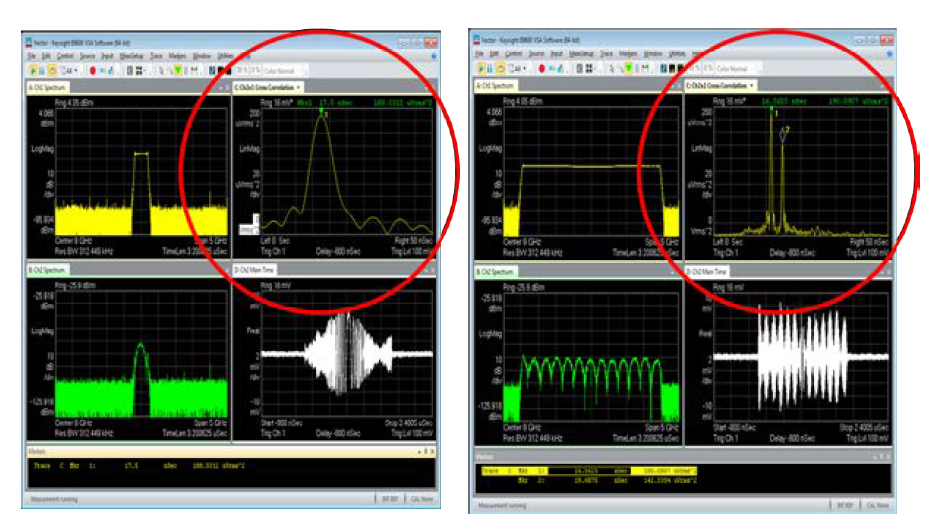
Если человек идет рядом с собакой и собака выпрыгивает на проезжую часть, то только широкополосный радар (см. справа на рис. 2) сможет распознать их по отдельности и предоставить правильную информацию водителю или системе беспилотного вождения.
Увеличение дальности обнаружения и улучшение разрешающей способности автомобильного радара делает вождение более безопасным в любых условиях. Отправляя SMS-сообщение на скорости 90 км/ч, водитель может проехать расстояние, равное длине футбольного поля. Отвлекаясь, он может не заметить замедления потока, но система ADAS успеет подать звуковое и визуальное предупреждение до возможной аварии. Если водитель ничего не предпринимает, то система ADAS может начать автоматическое торможение для предотвращения столкновения или уменьшения силы удара. Ответственную задачу обнаружения объектов на большом и малом расстоянии может выполнить только усовершенствованный автомобильный радар миллиметрового диапазона, способный работать днем и ночью, при солнце и дожде.
Контрольно-измерительные решения Keysight для проектирования и производства автомобильных радаров
При разработке автомобильных радаров миллиметрового диапазона требуется минимизировать потери при распространении, фазовый шум, ошибку IQ, погрешность частотной характеристики и модуль вектора ошибок. Для испытаний в миллиметровом диапазоне, особенно на частотах 76-81 ГГц, требуется сложное решение, объединяющее множество приборов, кабелей, соединителей и других принадлежностей, что усложняет обеспечение воспроизводимости результатов измерений. Для формирования и измерения характеристик широкополосных сигналов миллиметрового диапазона крайне важно использовать наиболее надежное и точное контрольно-измерительное решение.
Проектное моделирование
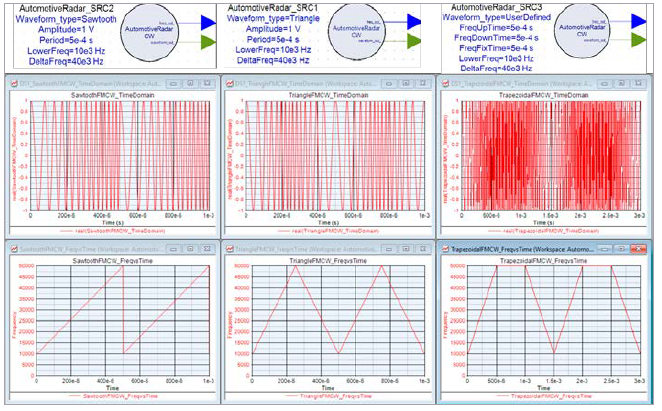
Основой наилучшей системы тестирования проектируемых автомобильных радаров является гибкое, точное и простое в настройке решение для формирования сигналов. Библиотека сигналов автомобильных радаров САПР SystemVue W1908 предназначена для разработчиков алгоритмов обработки модулирующего сигнала, системных архитекторов и инженеров- исследователей. Она содержит сведения о более чем 40 моделях автомобильных радаров и сценарии их моделирования. Библиотека предлагает расширенный инструментарий для формирования радарных импульсных сигналов FMCW, модулирующих сигналов, моделирования антенн и каналов, а также обработки сигналов. Пользователи могут подключать разные модели для запуска сценариев, например уникальную модель пешехода для микродопплеровского сценария компании Keysight.
Типовые проекты, такие как обнаружение нескольких целей, измерение скорости и трехмерное радиолокационное сканирование с помощью антенной решетки, являются хорошей отправной точкой для ранней реализации проектных идей в модели и прототипы. Так, библиотека САПР SystemVue позволяет генерировать три типа сигналов c частотной модуляцией FMCW (рис. 3). Возможность создания пользовательских сигналов позволяет формировать любые сигналы FMCW для максимально гибкого проектирования и тестирования.
Проектирование
Разработчики автомобильных радаров могут загружать смоделированные сигналы в генератор сигналов произвольной формы или векторный генератор сигналов Keysight, чтобы перенести их в миллиметровый диапазон и проверить свои разработки и модели с помощью реального аппаратного тестирования. Для формирования широкополосных сигналов при тестировании автомобильных радаров используют генераторы сигналов произвольной формы, например генератор Keysight M8195A с частотой дискретизации 65 Гвыб/с. Высокопроизводительное решение для формирования сигналов автомобильных радаров Keysight E8740A-070 состоит из генератора сигналов произвольной формы, векторного генератора сигналов и повышающего преобразователя частоты. Оно создает идеальные опорные сигналы (заменяет гетеродин и ГУН), тестовые сигналы радиолокационных отражений, преднамеренных и естественных помех (тестирование приемника).

Для измерения параметров сигналов широкополосного автомобильного радара, включая ВЧ-мощность, спектральные составляющие, фазовый шум, стабильность частоты и качество модуляции, компания Keysight предлагает решение E8740A-060, располагающее самыми мощными в отрасли возможностями анализа сигналов частотой до 100 ГГц с полосой до 5 ГГц, что обеспечивает дополнительный запас по характеристикам. Крайне низкий средний уровень собственных шумов (DANL) -150 дБм/Гц позволяет измерять низкоуровневые сигналы для высокочувствительных радаров, в том числе при тестировании по радиоэфиру.
Производство
Для снижения стоимости производственных испытаний автомобильных радаров компания Keysight предлагает надежное масштабируемое решение – Симулятор целей радаров ADAS (RTS), обеспечивающее точные и воспроизводимые результаты измерений. Оно позволяет вводить задержку, допплеровский сдвиг частоты и затухания для имитации дальности, угловой скорости и эффективной площади отражения (размера) цели с имитацией расстояния от 1 до 450 метров и скорости от нуля до ±360 км/ч.
Высокочастотный широкополосный радар – лучшее средство для обеспечения безопасности на дорогах сегодня и завтра
В настоящее время автомобильные радары чаще всего используются для обеспечения безопасного вождения в любых условиях. Преимущества новых более высокочастотных радаров диапазона 76-81 ГГц с увеличенной до 5 ГГц полосой заключаются в лучшей разрешающей способности, меньшем размере и весе, пригодности для использования в современных и будущих системах ADAS и перспективных системах беспилотного вождения.
Разработчикам автомобильных радаров необходимо оптимизировать методы проектирования и тестирования, чтобы уверенно доказывать надежность и безопасность своих решений, которые в идеале должны свести к нулю смертность в ДТП. Компания Keysight предлагает решения, которые помогают проектировать и тестировать автомобильные радары и в конечном счете спасать человеческие жизни.

Источник: www.keysight.com